В России построили сверхдешевого умного робота для сбора яблок. Фото
Собирать урожай в российских садах будут роботы
Как стало известно CNews, Финансовый университет при Правительстве России и Федеральный научный агроинженерный центр ВИМ (ФНАЦ ВИМ) разработали умного робота для сбора урожая яблок. Корпорация Microsoft выступила в роли технологического партнера, предоставив доступ к облаку Azure для ускоренного «обучения» машины.
По заявлению создателей, устройство превосходит отечественные и зарубежные конкурирующие разработки по показателям точности и эффективности работы. Продавать роботов планируют многократно дешевле иностранных аналогов.
Пилотные испытания разработки запланированы на весну 2021 г. В дальнейшем создатели намерены вывести продукт на рынки Европы, а также адаптировать его к сбору урожая других сельскохозяйственных культур.

По словам Игоря Смирнова, заведующего отделом интеллектуализации, автоматизации и роботизации сельскохозяйственного производства ФНАЦ ВИМ, садоводство на сегодняшний день остается одной из наименее цифровизированных отраслей сельского хозяйства. «Сбор урожая большинства плодовых культур обычно производится вручную с привлечением сезонных рабочих, занятых тяжелым физическим трудом, при этом до 40% плодов остаются несобранными», – говорит Смирнов.
Внедрение новинки с первого года позволит на 30% увеличить доходы хозяйств за счет сокращения недобора урожая, а также решить проблему нехватки человеческих ресурсов, считает специалист.
Как это работает
Отечественная новинка, как рассказали CNews ее создатели, предназначена для работы в интенсивных садах (в которых фруктовые деревья высажены с высокой плотностью) с высотой крон 1,5–2 м.
Робот собирает плоды, начиная с верхнего яруса, при помощи манипуляторов, оснащенных захватами. В среднем на убор одного плода, по оценке разработчиков, у робота уходит 10 секунд. Таким образом, за час одно такое устройство может собрать до 288 килограмм фруктов.
За разработку захватов в проекте отвечали специалисты отдела интеллектуализации, автоматизации и роботизации ФНАЦ ВИМ.
Функция поиска плодов на фруктовом дереве возложена на искусственный интеллект, в основе модели которого лежит нейросеть. Нейросетевой алгоритм машины, по данным разработчиков, может обнаруживать свыше 97% и обеспечивать сбор до 90% всех плодов на дереве. При этом доля ошибок системы, когда она принимает фоновый объект за яблоко, составляет 3,5%. Данные показатели, как утверждают создатели робота, значительно превышают эффективность иных роботов – сборщиков плодов: известные прототипы обнаруживают в среднем 85% плодов, а собирают 75%.

Нейросети, напомним, – это одно из направлений искусственного интеллекта, целью которого является моделирование аналитических механизмов, характерных для мозга человека. К задачам, которые обычно решаются с помощью нейросетей относятся классификация, предсказание и распознавание.
Разработкой нейросетевого алгоритма робота – сборщика яблок занималась научная группа департамента анализа данных и машинного обучения Финансового университета. «Повышение качества обнаружения плодов стало возможно благодаря использованию прогрессивных алгоритмов искусственного интеллекта, в частности, глубоких сверхточных нейронных сетей, которые сочетают в себе способности к распознаванию объектов по цвету, текстуре и форме», – рассказал Владимир Соловьев, руководитель департамента.
Для обучения нейросетей использовались облачные сервисы Microsoft Azure, по словам Соловьева, позволившие существенно ускорить процедуру, а также снизить стоимость разработки по сравнению с использованием локальных мощностей. «Облако не только сделало возможным реализацию этого проекта в принципе, но и помогло нам добиться впечатляющих результатов всего за полтора месяца», – отметил специалист.
Что дальше
Весной 2021 г. должны состояться пилотные испытания в крупных яблоневых садах России. В планах у создателей робота – вывод изделия на европейский рынок.
В будущем планируется разработать аналогичные алгоритмы для сбора урожая груш и томатов. Кроме того, рассматривается возможность использования устройства для мониторинга урожайности и распознавания основных болезней культур.
Цена робота, по словам его создателей, в среднем в семь раз ниже, чем у зарубежных аналогов. Окупаемость для европейских хозяйств составит около года. Российским садоводам обещают специальные ценовые предложения.
Цифровизация сельского хозяйства в России
По оценке индустриального директора радиоэлектронного кластера госкорпорации «Ростех» Сергея Сахненко, порядка 70% фермерских хозяйств США, Канады, Западной Европы используют умные технологии для сельского хозяйства. В России же спрос в этой сфере только формируется. В апреле 2020 г. «Ростех» и Минсельхоз России подписали соглашение о взаимодействии в области внедрения цифровых технологий в агропромышленном комплексе (АПК). В числе технологий «Ростеха», которые могут быть внедрены в российском АПК называются программные комплексы для управления фермами, роботизированные системы, беспилотная сельхозтехника, мониторинг объектов сельского хозяйства с помощью беспилотников, технологии точного земледелия на базе интернета вещей.
Помимо «Ростеха», цифровизацией АПК в России занимается, к примеру, компания Cognitive Pilot (входит в экосистему «Сбера»). С помощью разрабатываемой ею системы автономного управления сельскохозяйственной техникой Cognitive Agro Pilot с июня по октябрь 2020 г. в автономном режиме более 350 комбайнов обработали свыше 160 тыс. га площадей и собрали более 720 тыс. тонн урожая.
При помощи отечественных роботизированных технологий уборки урожая на базе искусственного интеллекта было собрано 590 тыс. тонн на 130 тыс. га зерновых культур (пшеница, соя, ячмень, овес, сорго, гречиха и пр.), а также порядка 130 тыс. тонн на 30 тыс. га рядковых и валковых культур (кукуруза, подсолнечник и пр.) в Калининградской, Калужской, Курской, Белгородской, Тамбовской, Пензенской, Ростовской, Томской, Курганской областях, Краснодарском, Красноярском и Ставропольском краях.
В ближайшие три года каждый десятый комбайн в России может стать беспилотным, считают в Cognitive Pilot.
Источник
Агро-робот с ИИ научился аккуратно собирать с грядки только созревший салат

Многие виды растений и сельхозкультур до сих пор собираются только вручную.
Инженеры из Кембриджского университета (Великобритания) создали рабочий прототип роботизированного сборщика урожая, способного самостоятельно распознавать готовые к срезанию неповрежденные кочаны салата, а также аккуратно их обрабатывать и собирать.
Чтобы собрать хороший урожай в автоматическом режиме нужно решить несколько сложных технологических задач, таких как:
— точное и правильное позиционирование на месте сбора, синхронизация действий с другими сборщиками;
— анализ и выбор правильных алгоритмов для использования с разными культурами;
— распознавание созревших плодов (листов, ягод);
— утилизация поврежденных или не проросших элементов;
— аккуратный захват и срезание готовых к сбору культур без повреждений;
— сортировка и укладка собранного урожая;
— логирование действий и способность к самообучению;
— проверка корректности текущих действий и минимизация повреждений на участке сбора.
Помимо того, выполнять все эти задачи необходимо с высокой скоростью и в реальных постоянно меняющихся условиях окружающего мира (ветер, дождик, насекомые, животные и так далее).
Группа инженеров Кембриджского университета успешно решила часть этих задач и опубликовала свои исследования в этой работе:
Ссылка на научную статью в издании Journal of Field Robotics.
Они создали небольшой и пока что мало автономный прототип самостоятельного робота-сборщика урожая, способного анализировать и выбирать правильные для сбора элементы.
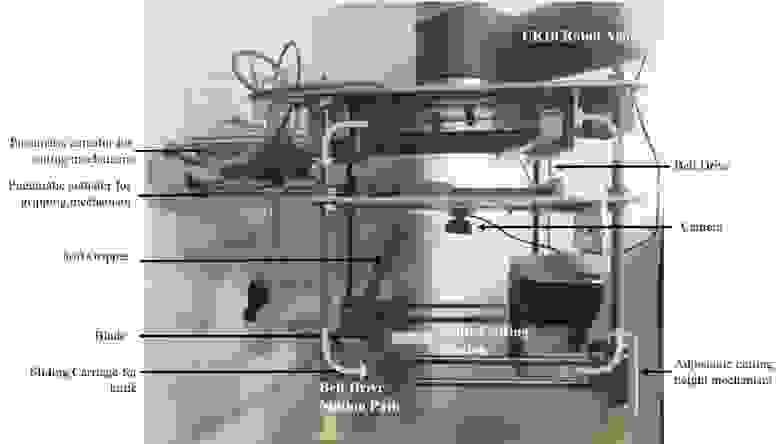
Этот робот-сборщик представляет из себя манипулятор на колесной платформе шириной в одну грядку. Манипулятор оснащен захватом, ножом для срезания и видеокамерой, дополнительная видеокамера расположена в верхней части его платформы.
Так как это еще только прототип, который для массового применения будет значительно дорабатываться как элементно, так и функционально, то инженеры просто установили все необходимые им для проведения испытательных полевых исследований компоненты робота на пассивной колесной платформе, передвигаемой оператором вручную.
Их задача была – научить робота понимать процесс сбора урожая и автоматизировать его действия с помощью машинного обучения.
После того, как робот оказывается над новыми кочанами салата, активируется процесс распознавания и классификации кочанов салата с помощью видеокамер и нейросетей.
Картинки с видеокамер на манипуляторе и платформе использовались для:
— локализация кочанов салата, находящихся перед видеокамерой – с помощью сверточной нейросети YOLO version 3, для обучения которой было использовано 1500 фотографий;
— классификации кочанов салата по четырем типам (созревший элемент, несозревший элемент, зараженный\поврежденный элемент, отсутствие элемента) с помощью сверточной нейросети Darknet Object Classification Network, для обучения которой было использовано 665 фотографий.

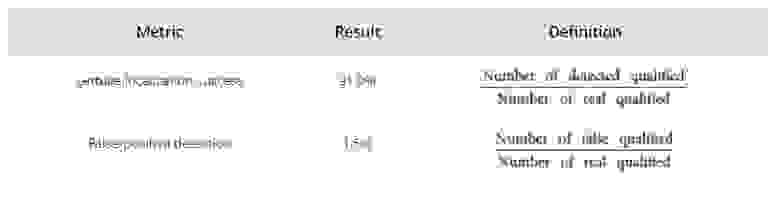
Полевые испытания робота-сборщика показали, что он способен:
— определять кочаны салата перед собой с точностью 91%;
— корректно классифицировать кочаны салата с точностью 85%.
— время одного цикла работы (переход от одного кочана салата к другому) 32 секунды, что очень много, но этот момент будет еще дорабатываться.
Оказывается, что сами грядки очень заросшие и места прорастания кочанов салата очень сложно просто так локализовать и классифицировать:
Поэтому салат убирают в ручном режиме быстро, но все подряд без особого и тщательного отбора:

Да и создать небольшую платформу с роботом-уборщиком сложно, ведь устройство должно быть подвижно, достаточно стабильно держаться на поверхности на рыхлой земле и не разрушать своими компонентами грядки.
Вот какие ограничения по размерам для элементов и параметры у прототипа робота-сборщика были:

Что получилось в итоге на полевых испытаниях после его сборки:

Кстати, платформу с роботом назвали Vegebot.
Структурная схема взаимосвязи компонентов платформы Vegebot:

Причем, обе видеокамеры в этом решении – самые простые и дешевые USB веб-камеры.
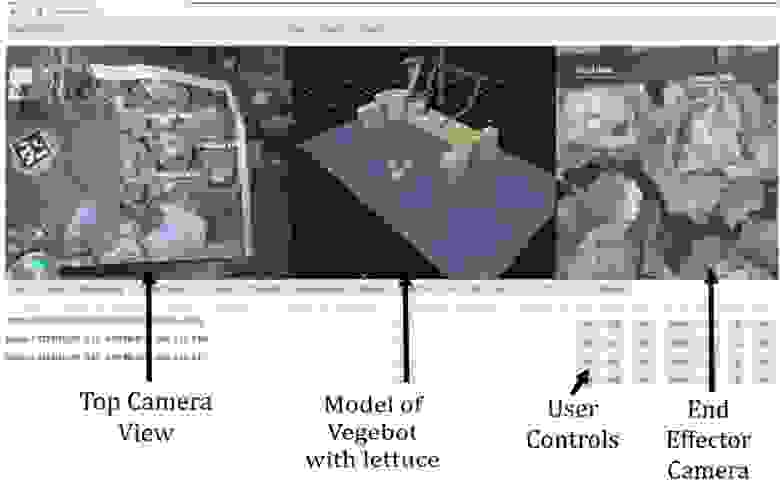
Программная часть Vegebot (архитектура и веб-интерфейс), используется Robot Operating System (ROS):

Диаграммы циклов работы Vegebot (циклы обучения, сбора):

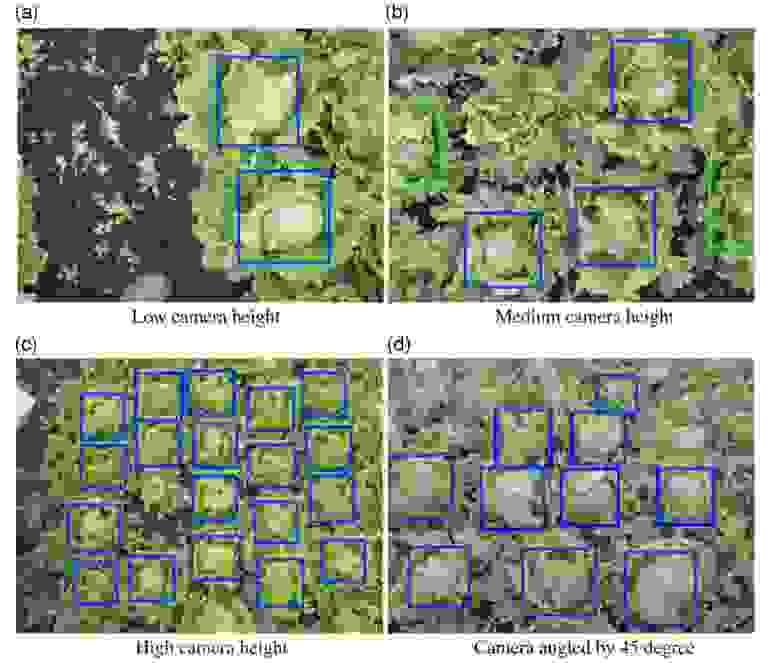
Подготовка к полевым испытаниям, исследование грядок и анализ картинок кочанов салата с разных высот расположения камеры:

А ведь каков шнурок-ремешок для ноутбука! Инженерная смекалка в деле!

Таблица с разными типами фотографий для локализации кочанов салата, находящихся перед видеокамерой (для обучения сверточной нейросети YOLO version 3):
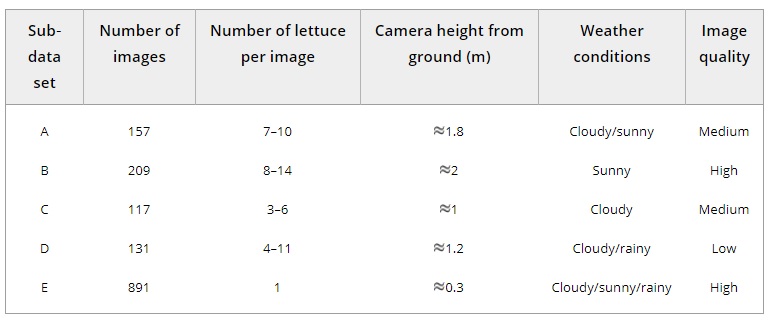
Таблица с разными типами фотографий для классификации кочанов салата по четырем типам (созревший элемент, несозревший элемент, зараженный элемент, отсутствие элемента) для обучения сверточной нейросети Darknet Object Classification Network:


Промежуточные варианты механизмов и элементов Vegebot:

Двойной элемент для сбора кочанов салата (захват и нож):

Роторный двигатель постоянного тока (слева), линейный привод с ножевым механизмом (справа):


Финальная версия механизма захвата и сбора урожая с ременным приводом и системой двойного пневматического привода:
Характеристики и размеры механизма захвата Vegebot:

Принцип работы механизма захвата Vegebot (T — force threshold, FR — ground reaction forces):

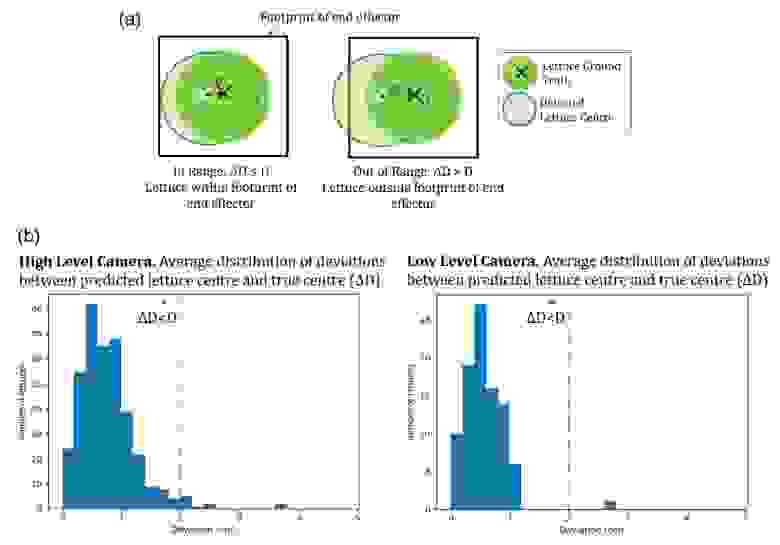
Позиционирование механизма захвата Vegebot с помощью двух бортовый видеокамер:
Компенсация внешних факторов освещения и параметров изображений с видеокамер для оптимальной локализации кочанов салата:


Примеры локализации (распознавания) кочанов салата на изображениях с видеокамер на разной высоте и под разными углами:


Полученные полевые данные по локализации (распознаванию) кочанов салата с помощью Vegebot (на основе 60-ти попыток Vegebot распознать кочан салата):
Параметры изображений и матрица для классификации кочанов салата:

Время работы и траектории механизма захвата Vegebot:
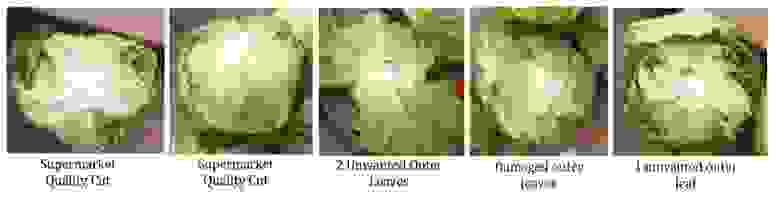
Возникла в процессе проведения полевых испытаний проблема с определением количества ненужных (торчащих) листьев на кочане салата после сбора, которые нужно удалить.
Вот какие варианты тут есть: идеально срезанный кочан салата без торчащих листьев, кочан салата с одним торчащим листом, кочан салата с двумя торчащими листами, кочан салата с поврежденными листами.
В зависимости от количества лишних листьев на кочане салата и необходимости их распознавания и удаления, рабочий цикл Vegebot тоже меняется:
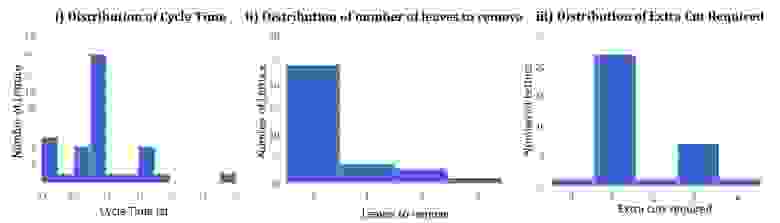
Итоговые данные по полевым испытаниям прототипа робота-сборщика урожая Vegebot:

Конечно, данный прототип еще далек от промышленного аграрного использования, но ведь это только начало исследований.
Источник